")
")
")
")
")
")
")
")








Pagos y Seguridad
Su Información de Pago se procesa de forma segura. No almacenamos los datos de la tarjeta de crédito ni tenemos acceso a la información de su tarjeta de crédito.
Descripción
- Rover Leo v1.8 (Ensamblado)
- Cuenta con un kit de robótica para exteriores 4WD
- De código abierto y construido en Raspberry Pi
- Diseñado para ser confiable, hermético y extensible
- Capacidad de carga útil: aprox. 5kg
- Transmisión de video e interfaz de usuario de conducción lista para usar
El Rover Leo v1.8 (Ensamblado) cuenta con un kit de robótica para exteriores de cuattro ruedas y está diseñado para ser confiable, hermético y extensible.
Utiliza 4 motores de corriente continua con buje y caja de cambios planetaria 73,2:1 y codificador de 12 CPR y se acciona sobre 4 ruedas de 130 mm de diámetro y neumáticos de goma con inserto de espuma (no neumática).
")
El tamaño máximo estimado del obstáculo es de 70 mm durante unas 4 horas de conducción nominal. Durante la transmisión de video en vivo, puede conectarse al Leo Rover hasta una distancia de 100 metros. Su cámara tiene una resolución de 5 MPx y utiliza una lente ojo de pez con un campo de visión de 160 grados.
")
De forma predeterminada, Leo Rover se controla de forma remota con transmisión de video y una interfaz de usuario lista para usar. No es autónomo, pero está preparado para la autonomía. El software se basa en Ubuntu 20.04 y Robot Operating System (ROS), que es conocido por la facilidad de implementación de funciones de autonomía y semiautonomía.
La forma más sencilla es agregar una cámara lidar o de visión estereoscópica para mejorar la autonavegación de Rover y luego construir sus funciones sobre eso. El Rover en sí tiene una cámara frontal y codificadores de 4 ruedas a bordo, por lo que proporciona transmisión de video y odometría básica lista para usar.
")
Tenga en cuenta que: Dado que el fabricante trabaja constantemente para mejorar el diseño, el Rover que reciba puede verse y actuar de forma un poco diferente a lo que se ve en los videos y demostraciones.
- 1x Leo Rover v1.8 (ensamblado)
- 1x Cargador de batería
- 1x Destornillador de cabeza hexagonal para montar/desmontar módulos adicionales
- Acceso al canal privado oficial de la comunidad de Slack para soporte, solución de problemas y ayuda con las integraciones
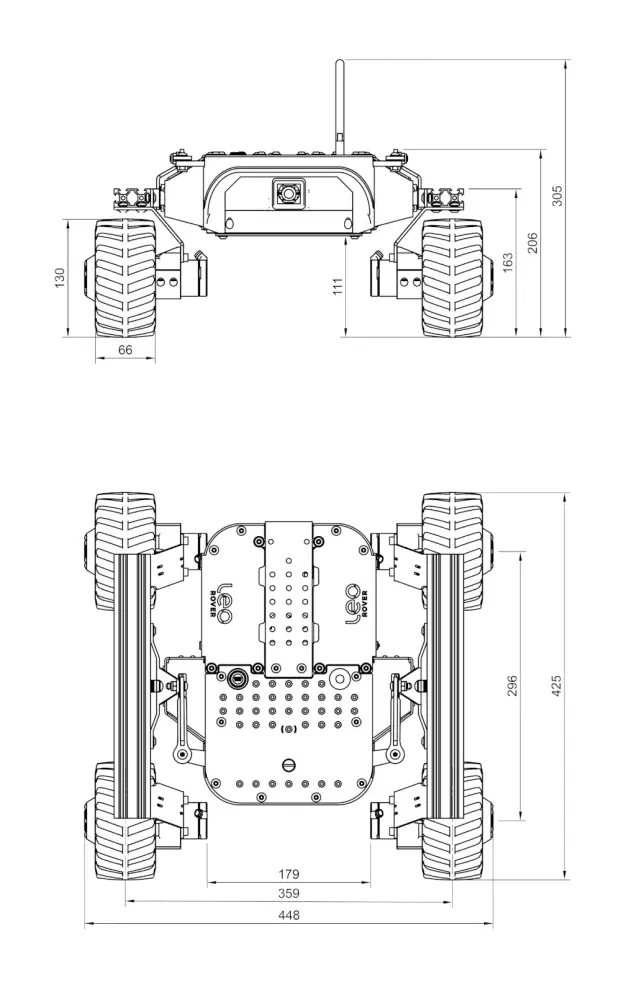
Tamaño
- Peso: 6,5 kg
- Tamaño: 448 x 425 x 305 mm
- Capacidad de carga útil: aprox. 5kg
Tamaño de montaje de la plataforma superior
- Tamaño: 299 x 183 mm
- Rejilla de agujeros: 18 x 15 mm
- Agujeros: 40 x Φ 7mm + 22 x Φ 5,5 mm
Rendimiento
- Tamaño máximo estimado del obstáculo: 70 mm
- Grado de protección: cumple con IP55 (no certificado)
- Tiempo de ejecución: 4 horas estimadas de conducción nominal
- Rango de conexión: Hasta 100 m (con transmisión de video en vivo)
Ruedas
- Motores: 4 motores DC de buje con caja de engranajes planetarios de 73,2:1 y codificador de 12 CPR
- Diámetro de la rueda: 130 mm
- Material del neumático: caucho con inserto de espuma (no neumático)
Batería
- Voltaje: 11,1 V DC
- Capacidad: 5000 mAh
- Tipo: Li-Ion con PCM interno Funciones de seguridad contra cortocircuito, sobrecorriente y sobredrenaje
- Máx. corriente: 8 A (total para todo el Rover)
Cámara
- Resolución de la cámara: 5 MPx
- Lente: Ojo de pez con campo de visión de 160 grados (IR sin filtrar; se permite visión nocturna)
Red
- Punto de acceso WiFi 2,4 GHz con antena externa
- WiFi 2.4 GHz + 5 GHz en antenas RPi internas para conectividad
Software
- Sistema operativo: LeoOS basado en Ubuntu 20.04 + ROS Noetic. soporte ROS2
- Interfaz de usuario lista para usar ubicada en '10.0.0.1' cuando se usa la imagen de software Leo estándar
- Firmware de código abierto
Electrónica
- RaspberryPi 4B 2GB (o superior) como computadora principal
- LeoCore como microcontrolador en tiempo real: STM32F4 (@84MHz, 64KB RAM, 256KB Flash)
Velocidad
- Máx. velocidad lineal: aprox. 0,4 m/s
- Máx. velocidad angular: aprox. 60 grados/segundo
Interfaces de Conexión - Disponible externamente
- 1x Conector microUSB a prueba de agua
- 1x Conector macho de antena RP-SMA.
- 1x Toma de corriente de 3 pines Weipu SP13 de 12 V.
Interfaces de conexión - Interfaces internas abiertas
- Raspberry Pi: 2x USB, 20x GPIO, RJ45 Ethernet, 1x puerto de pantalla RPi, Bluetooth 5.0 con BLE
Controlador
- Necesita cualquier dispositivo habilitado para la web para acceder a la interfaz de usuario estándar en '10.0.0.1' en su navegador.
- Requisitos del dispositivo: Windows/Linux/Android/macOS
- Para un desarrollo más fácil, se recomienda encarecidamente ROS en su dispositivo.