





Pagos y Seguridad
Su Información de Pago se procesa de forma segura. No almacenamos los datos de la tarjeta de crédito ni tenemos acceso a la información de su tarjeta de crédito.
Descripción
- CrowBot BOLT-Kit de coche robot inteligente programable de código abierto STEAM
- Con mango de Joystick y control remoto infrarrojo
- Equipado con múltiples sensores y capacidades de Wifi/Bluetooth
- Ofrece 16 lecciones en tres idiomas para principiantes en programación
- Compatible con más de 150 tipos de módulos Crowtail
- Compacto y ligero, mide 128 x 92 x 64 mm y pesa 900 g
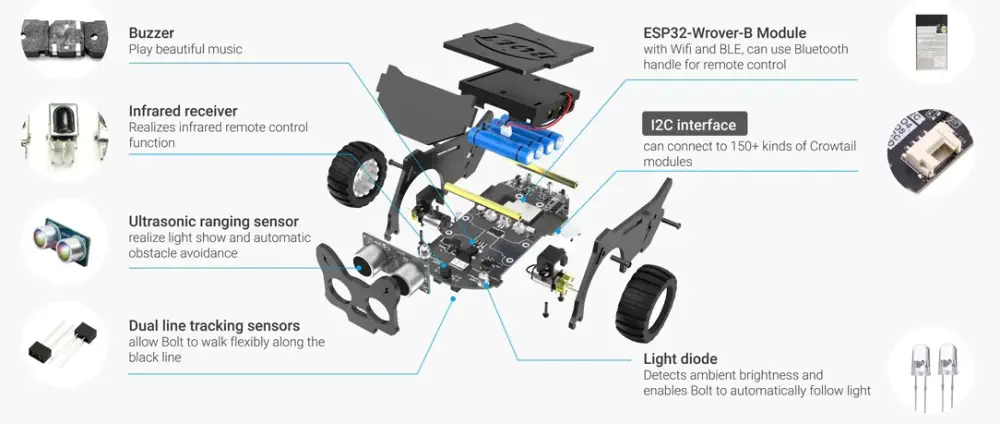
El Kit de Coche Robot Inteligente Programable de Código Abierto CrowBot BOLT c/ Joystick es un innovador vehículo de programación inteligente, alimentado por un chip ESP32. Este dispositivo cuenta con múltiples sensores, incluyendo un sensor de luz, sensor ultrasónico, y sensor de seguimiento de línea. También cuenta con capacidades de Wifi y Bluetooth, lo que lo convierte en una herramienta versátil para diversos entornos de programación como Letscode, Micropython, y Arduino.
El CrowBot BOLT es capaz de ejecutar una gama de funciones rápidamente, incluyendo seguimiento de luz, seguimiento de línea, evasión de obstáculos, control remoto, y espectáculo de luces. Como un robot educativo STEAM amigable para principiantes, el BOLT está diseñado para hacer el proceso de aprendizaje y enseñanza de programación de robots tanto simple como agradable.
Este kit incluye 16 lecciones en tres idiomas diferentes: Letscode, Arduino, y MicroPython. Ofrece una rica experiencia de programación gráfica, lo que lo convierte en una herramienta de aprendizaje ideal para novatos en programación. El BOLT fomenta el aprendizaje a través de la creatividad y la diversión.
Además, el CrowBot BOLT tiene dos interfaces de expansión reservadas. Estas pueden ser utilizadas con más de 150 tipos de módulos Crowtail, ofreciendo posibilidades ilimitadas para la creatividad y exploración.

- 1x Chasis
- 1x Sensor ultrasónico
- 1x Portapilas
- 2x Rueda
- 4x Tornillo M3*8mm
- 2x Columna de cobre M3*5mm
- 2x Placa acrílica lateral
- 1x Placa acrílica frontal
- 1x Destornillador
- 2x Cable Crowtail de 4 pines
- 1x Cable Tipo C
- 1x Control remoto infrarrojo
- 1x Joystick
- 1x Instrucciones y mapa de seguimiento de línea
- 128 x 92 x 64 mm
- Procesador: Esp32-Wrover-b (8MB)
- Programación: Letscode, Arduino, Micropython
- Método de control: Control remoto Bluetooth/Control remoto infrarrojo
- Entradas: Botón, Sensor de luz, Módulo receptor infrarrojo, Sensor ultrasónico, Sensor de seguimiento de línea
- Salidas: Zumbador, Luz RGB programable, Motor
- Wifi y Bluetooth: Sí
- Sensor de luz: Puede realizar la función de seguimiento de luz o evasión de luz
- Sensor ultrasónico: Cuando se detecta un obstáculo, la ruta de conducción del coche puede ser corregida para evitar el obstáculo
- Sensor de seguimiento de línea: Puede hacer que el coche se mueva a lo largo de las líneas oscuras/negras, juzgando inteligentemente y corrigiendo la ruta de conducción
- Zumbador: Puede hacer que el coche suene/silbe, brindando una experiencia sensorial más directa
- Luz RGB programable: A través de la programación, puede mostrar luces coloridas en diferentes escenas
- Receptor infrarrojo: Recibe señales de control remoto infrarrojo para realizar el control remoto
- Interfaz: Tipo c x1, puerto I2C x1, puerto A/D x1
- Tipo de motor: Motor de engranaje micro DC GA12-N20
- Temperatura de trabajo: -10 ~+55 ℃
- Alimentación: Pilas de 1,5V 4x (No incluidas)
- Duración de la batería: 1.5 horas
- Peso: 900 g
Estimar envío
También le puede interesar


SKU: RB-Ecw-117


SKU: RB-Ecw-118
Reabastecimiento pronto Ver fecha de entrega
Notificarme

SKU: RB-Elf-368


SKU: RB-Ecw-77


SKU: RBC-Kng-05
Reabastecimiento pronto Ver fecha de entrega
NotificarmeSKU: RBC-Apt-119
Reabastecimiento pronto Ver fecha de entrega
NotificarmeSKU: RBC-Apt-121
Reabastecimiento pronto Ver fecha de entrega
Notificarme

SKU: RB-Kkr-23


SKU: RM-YAHB-004
SKU: RBC-Apt-99