





Pagos y Seguridad
Su Información de Pago se procesa de forma segura. No almacenamos los datos de la tarjeta de crédito ni tenemos acceso a la información de su tarjeta de crédito.
Descripción
- Robot humanoide Aldebaran Robotics Nao6
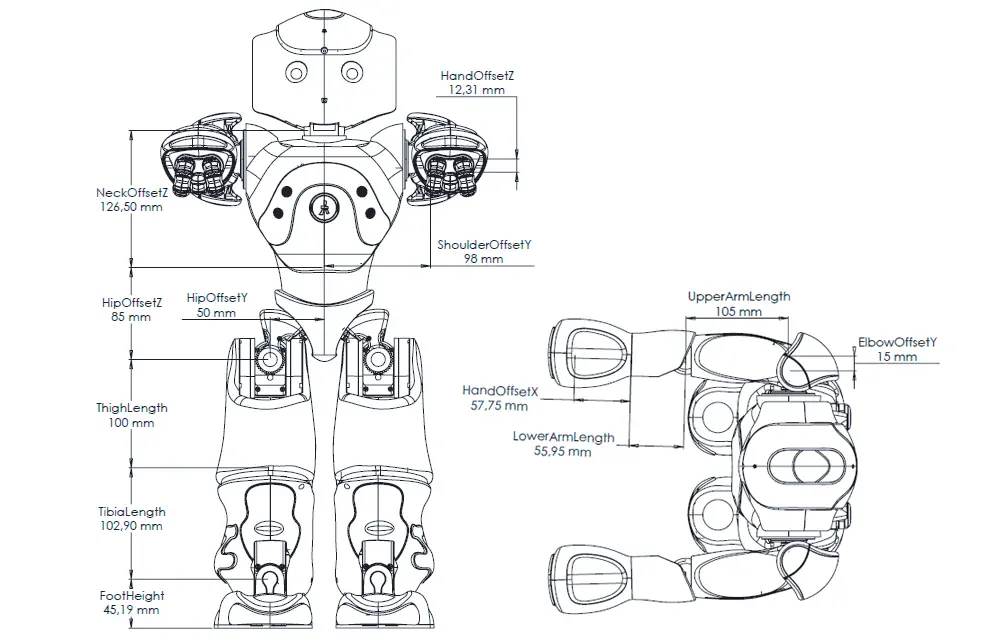
- Robot bípedo de 58 cm de altura y 25 grados de libertad.
- Plataforma abierta y totalmente programable
- 4 micrófonos direccionales y altavoces
- Batería de iones de litio extraíble de 27,6 Wh
- El reconocimiento de voz y el diálogo están disponibles en 20 idiomas.
El Robot Humanoide Aldebaran Robotics NAO6 es un robot humanoide bípedo que ha ayudado a revolucionar varias industrias, como la educación, la atención sanitaria, la asistencia hotelera y el entretenimiento. Es probablemente el robot "multiusos" más emblemático y divertido.
Ideal para enseñar materias STEM con Python o programación basada en bloques, NAO hace que el aprendizaje sea divertido y accesible. También es una herramienta valiosa para todas las materias, desde la educación primaria hasta la educación superior, así como para la formación profesional. Gracias a la nueva IA generativa, cualquier persona puede crear interacciones infinitas a partir de indicaciones simples.

NAO es el primer robot humanoide creado por Aldebaran. Famoso en todo el mundo, NAO es una herramienta de programación lúdica y se ha convertido en un estándar en educación e investigación. NAO también es utilizado como asistente por empresas y centros de salud para recibir, informar y entretener. visitantes.
Con una altura de 58 cm, un peso de 5,6 kg y 25 grados de libertad, NAO es un robot bípedo con rasgos agradablemente redondeados. Con más de 19.000 NAO desplegados en más de 70 países, este robot humanoide ha dejado su huella en varias industrias. En educación, investigación e instalaciones de atención a personas mayores, NAO se ha vuelto indispensable para impulsar la innovación y mejorar las experiencias.
- 1x Robot Humanoide Aldebaran Robotics NAO6
- 574 x 311 x 275 mm / 22,6 x 12,2 x 10,8 pulgada
- CPU
- Procesador CPU: ATOM E3845
- Memoria caché: 2 MB
- Velocidad de reloj: 1,91 GHz
- RAM: 4 GB DDR3
- Memoria flash: 32 GB eMMC
- Idiomas
- Checo, Danés, Holandés, Inglés, Finés, Francés, Alemán, Italiano, Japonés, Griego, Polaco, Portugués Europeo, Portugués Brasileño, Español, Sueco, Ruso, Turco, Árabe, Brasileño, Mandarín Estándar, Mandarín Taiwanés, Noruego
- Audio
- Altavoces: Izquierdo & Derecho
- Impedancia: 4 Ω
- Potencia de audio: 87 dB +/- 3 dB
- Rango de frecuencia: hasta ~20 kHz
- Entrada: 2 W
- Micrófonos: x4 omnidireccionales en la cabeza
- Sensibilidad: -12 dBV / PA a 1 KHz
- Rango de frecuencia: 100 HZ a 10 KHz
- LED
- Cabeza Táctil: 12 (16 niveles de blanco)
- Ojos: 2x8 RGB FullColor
- Orejas: 2x10 16 niveles de azul
- Botón del pecho: 1 RGB FullColor
- Pies: 2x1 RGB FullColor
Cámara 2D
- Cámaras: 2 frente a la cabeza
- Modelo de sensor: OV5640
- Tipo de sensor: SoC - Sensor de Imagen CMOS
- Matriz de imágenes
- Resolución: 5 MP
- Tamaño: 1/4 pulgada
- Píxeles activos (HxV): 2592 x 1944
- Sensibilidad
- Tamaño de píxel: 1,4 x 1,4 μm
- Rango dinámico: 68 dB a 8x ganancia
- Relación Señal/Ruido (máx): 36 dB
- Responsividad: 600 mV/lux-sec
- Salida
- Salida de cámara: 640 x 480 a 30 fps
- Formato de datos: YUY & RGB
- Tipo de obturador: Obturador Rodante/ exposición de cuadro
- Vista
- Campo de visión: 67,4° DFOV (56,3° HFOV, 43,7° VFOV)
- Rango de enfoque: 10 cm ~ ∞ ≈ 4 pulgada - ∞
- Tipo de enfoque: Autofocus
Tasas de fotogramas
- 320x240 px @15, 30 fps @15, 30 fps
- 640x480 px @15, 30 fps @15, 30 fps
- 1280x960 px @15, 30 fps @10, 15 fps
- 1920x1080 px @15, 30 fps
- 2560x1920 px @15 fps
Sensores de Entorno
- Giroscopio
- Ejes: 3
- Precisión: 5%
- Velocidad angular: 500°/s aprox.
- IMU
- Ejes: 3
- Precisión: 10%
- Velocidad angular: 2 g aprox.
- Mecánico
- Peso: 5,5 kg
Sonar
- Transmisores: 2 en el frente
- Receptores: 2 en el frente
- Frecuencia: 40 kHz
- Resolución: 1 cm @50 cm
- Rango de detección: 0,20 m a 0,80 m
- Cono efectivo: 60°
Resistencias Sensibles a la Fuerza (FSR)
- Rango 0 a 25 N
- Ubicación: 4 en cada pie
- Sensibilidad: 40 g aprox.
Botones y Sensores
- Botón del Pecho
- Parachoques del Pie
- Cabeza Táctil
- Mano Táctil
Energía
- Batería
- Tipo: Ion de Litio
- Voltaje/capacidad nominal: 21,6 V / 2,9 Ah
- Voltaje máximo de carga: 25,2 V
- Corriente de carga recomendada: 1,8 A
- Corriente máxima de carga/descarga: 2,1 A / 2,0 A
- Energía: 62,5 Wh
- Duración de carga: 90 min
- Tiempo de ejecución: 60 min (Uso activo), 90 min (Uso normal)
- Cargador de Batería
- Entrada: 100 a 240 V AC – 50 / 60 Hz – Máx 1,2 A
- Salida: 25,2 VDC – 2 A
Movimiento
- Cabeza: 2 DoF
- Brazo (en cada uno): 5 DoF
- Mano (en cada una): 1 DoF
- Pelvis 1 DoF
- Pierna (en cada una): 5 DoF
Motor
- Tipo de motor: DC Coreless con escobillas
Software
- Open Nao:
- GNU/Linux Integrado
- Distribución basada en Gentoo
- Arquitectura: 86
- Programación:
- Integrado: C++ / Python
- Remoto: Java