















Pagos y Seguridad
Su Información de Pago se procesa de forma segura. No almacenamos los datos de la tarjeta de crédito ni tenemos acceso a la información de su tarjeta de crédito.
Incluido en este paquete
- 1 X RBC-Kel-05 - Batería Li-Ion 6S 11,1 V 5000 mAh para Kit de Desarrollo de Rover Leo 4WD
- 1 X RBC-Kel-04 - Kit de Desarrollo Rover Leo v1.8
Descripción
- Kit de Desarrollador Leo Rover v1.8 c/ Batería Adicional
- Capacidad de carga útil: hasta 5 kg
- Diseñado para ser confiable, hermético y extensible
- Proporciona hasta 4 horas de conducción continua
- Cuenta con una cámara de 5MP y transmisión en vivo
- De código abierto y basado en ROS
El Kit de Desarrollador Leo Rover v1.8 c/ Batería Adicional está diseñado para ser confiable, hermético y extensible. Utiliza 4 motores DC en el cubo con una caja de cambios planetaria de 73,2:1 y 12 codificadores CPR y se mueve sobre 4 ruedas de 130 mm de diámetro y neumáticos de goma con inserto de espuma (no neumática).
La cámara incorporada tiene una resolución de 5 MP y utiliza una lente ojo de pez con un campo de visión de 170 grados. El intuitivo software de transmisión en vivo del rover se inspiró en las misiones realizadas por los robots de exploración en Marte.
Más compacto y ligero que la mayoría, el robot móvil Leo Rover consta de una plataforma rectangular montada sobre un chasis con tracción en las 4 ruedas, capaz de adaptarse a los terrenos más difíciles ya que está diseñado para ser fiable, estanco y extensible. El software reversible de código abierto le permite profundizar en un núcleo y le brinda la oportunidad de probar nuevas ideas libremente.
Este robot móvil basado en Raspberry Pi puede generar un punto de acceso WiFi al que luego puede conectarse simplemente usando su tableta, teléfono móvil o computadora. Entonces se beneficiará de una conexión inalámbrica de 2,4 GHz y podrá controlar su robot móvil de forma remota en Windows, macOS, Android y Linux.

De forma predeterminada, Leo Rover se controla de forma remota con transmisión de video y una interfaz de usuario lista para usar. No es autónomo, pero está preparado para la autonomía. El software se basa en Ubuntu 20.04 y Robot Operating System (ROS), que es conocido por la facilidad de implementación de funciones de autonomía y semiautonomía.
La forma más sencilla es agregar una cámara lidar o de visión estereoscópica para mejorar la autonavegación del Rover y luego construir sus características sobre eso. El Rover en sí tiene una cámara frontal y codificadores de 4 ruedas a bordo, por lo que proporciona transmisión de video y odometría básica lista para usar.

Tenga en cuenta: Dado que el fabricante trabaja constantemente para mejorar el diseño, el Rover que reciba puede verse y actuar de manera un poco diferente a lo que se ve en los videos y demostraciones.
- 1x Kit de desarrollo Leo Rover v1.8 (sin montar)
- 1x Batería adicional
- 1x Cargador de batería
- 1x Destornillador de cabeza hexagonal para montar/desmontar módulos adicionales
Herramientas necesarias para montar: todo está en la caja.
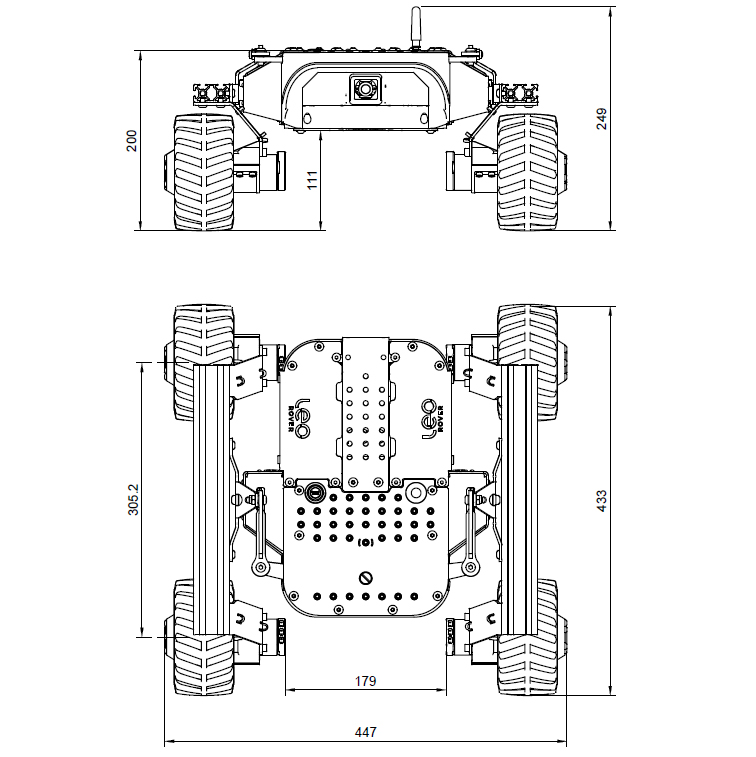
- 447 x 443 x 249 mm (largo x ancho x alto)
- Diámetro de la rueda: 130 mm
Montaje de plataforma superior
- 299 x 183 mm
- Rejilla de agujeros: 18 x 15 mm
- Agujeros: 40 x Φ7 mm + 22 x Φ 5,5 mm
- Capacidad de carga útil: hasta 5 kg
- Resolución de la cámara: 5MP
- Lente: Ojo de pez con campo de visión de 170° (IR sin filtrar | visión nocturna permitida)
- Peso: 6,5 kg
Rendimiento
- Clasificación de protección: cumple con IP66 (no certificado)
- Tiempo de ejecución: 4 horas estimadas de conducción nominal
- Rango de conexión: Hasta 100 m (con transmisión de video en vivo)
Ruedas
- Motores: 4 motores DC en el cubo con caja de engranajes planetarios de 73,2:1 y codificador de 12 CPR
- Material del neumático: Caucho con inserto de espuma (no neumático)
Batería
- Voltaje: 11,1 V DC
- Capacidad: 5000 mAh
- Tipo: Li-Ion con PCM interno Funciones de seguridad contra cortocircuito, sobrecorriente y sobredrenaje
- Corriente máx.: 8 A (total para todo el Rover)
Red
- Punto de acceso WiFi 2,4 GHz con antena externa
- WiFi 2.4 GHz + 5 GHz en antenas RPi internas para conectividad
Software
- Sistema Operativo: Ubuntu 20.04 + Sistema Operativo Robot
- Interfaz de usuario lista para usar ubicada en '10.0.0.1' cuando se usa la imagen de software Leo estándar
- Firmware de código abierto
Electrónica
- RaspberryPi 4B 2GB (o superior) como computadora principal
- LeoCore como microcontrolador en tiempo real: STM32F4 (a 84 MHz, 64 KB RAM, 256 KB Flash)
Velocidad
- Velocidad lineal máx.: aprox. 0,4 m/s
- Velocidad angular máx.: aprox. 60 grados/segundo
Interfaces de conexión - Disponible externamente
- 1x Enchufe micro USB resistente al agua
- 1x Conector macho de antena RP-SMA
- 1x Toma de corriente de 3 pines Weipu SP13 de 12 V
Interfaces de conexión - Interfaces internas abiertas
- RaspberryPi: 2x USB, 20x GPIO, RJ45 Ethernet, 1x puerto de pantalla RPi, Bluetooth 5.0 con BLE
Controlador
- Necesita cualquier dispositivo habilitado para la web para acceder a la IU de stock en '10.0.0.1' en su navegador
- Requisitos del dispositivo: Windows/Linux/Android/macOS
- Para facilitar el desarrollo, se recomienda encarecidamente ROS en su dispositivo