
Description
- Unitree Dex3-1 Tactile Hand for Unitree H2 (Right)
- Offers three-finger dexterous hand with 7 degrees of freedom
- Designed for versatile operation
- Featuring hybrid force–position control
- Delivers both sensitivity and reliability
The Unitree Dex3-1 Tactile Hand for the Unitree H2 (Right) is a power-controlled, highly dexterous robotic hand designed for versatile operation. Featuring hybrid force–position control, it delivers both sensitivity and reliability, enabling precise manipulation of objects.

The Dex3-1 is a three-finger dexterous hand with 7 degrees of freedom and 7 independent motion axes: six micro brushless force-control direct-drive joints and one micro brushless force-control gear-drive joint. Equipped with 33 tactile sensors, it offers detailed feedback for advanced control. It can be paired with the Unitree G1 humanoid robot to execute a wide range of complex tasks.
- 1x Unitree Dex3-1 Tactile Hand for Unitree H2 (Right)
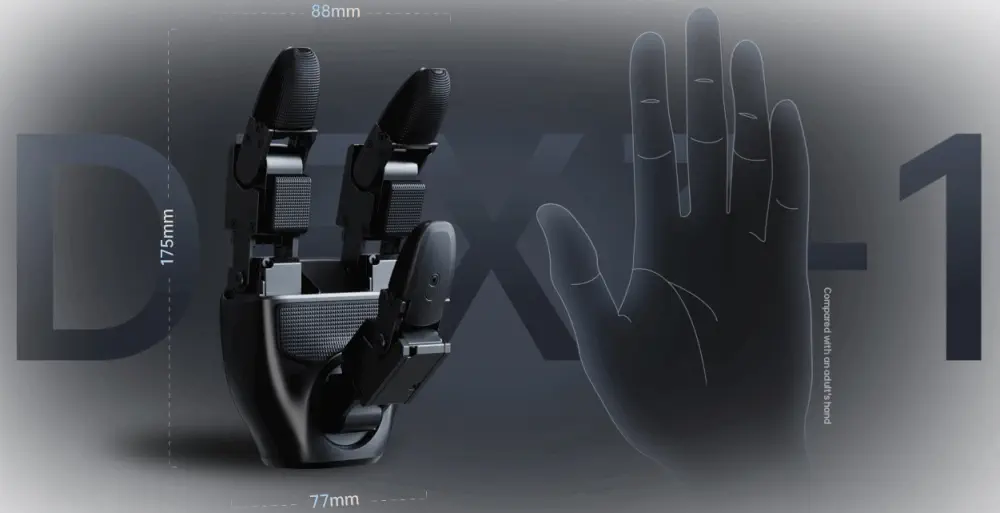
- 88 x 77 x 175 mm (L x W x H)
- Degrees of Freedom
- Thumb x3
- Index Finger x2
- Middle Finger x2
- Transmission Mechanism
- 6 Motors Drive Directly
- 1 Motor Drive with Gears
- Angle of Joint
- Thumb Joint 0: -60°~60°
- Thumb Joint 1: -35°~60°
- The Thumb Joint 2: 0 to 100°
- Index Finger Joint 0: 0 °~90°
- Index Finger Joint 1: 0 °~100°
- Middle Finger Joint 0: 0 °~90°
- Middle Finger Joint 1: 0 °~100°
- Fingertip Repeat Positioning Accuracy: ±2mm
- Working Voltage: 12 ~ 58V
- Static Current: 58V at 0.2A
- Maximum Current: 10A
- Communication Interface: USB 2.0
- Working Temperature Range: -20°C ~ 60 °C
- Load Conditions (Palm Facing Down At Room Temperature, Grasping A 5cm Round Hard Object)
- The Maximum Weight is 500g
- The Maximum Power is: 400W at 3s
- Load Condition (Palm Facing Left At Room Temperature, Grasping A 5cm Round Hard Object)
- The Maximum Weight is 500g
- The Maximum Power is: 400W at 3s
- Number of Pressure Sensors: 9 (Total of 33 Pressure Sensors)
- Array resolution
- 2x2 (Palm) x3
- 2x2 (Single Finger Pad) x3
- 3x1 (Single Fingertip) x3
- Range of Perception: 10g-2500g
- Maximum Acceptance (Unamaged): 20 kg
- Communication rate: 1000 Hz
- The number of bytes in a full packet
- Sender: 1234 bytes
- Receiver: 1270 bytes
- Perceptual feedback: Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, Sensor Pressure Value, Sensor Temperature Value, imu Data
- Control feedback: Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient
- Weight: 710 g
Estimate shipping
WARNING: This product can expose you to chemicals including lead and lead compounds, which are known to the State of California to cause cancer and birth defects or other reproductive harm. For more information go to: www.P65Warnings.ca.gov.