

















Payments and Security
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Description
- Managing max 155mm (6") vertical step (obstacle)
- All 802.11G (optional 802.11N) wirelessly connected
- Light weight (< 20Kg) with excellent payload capacity
- Autonomous navigation with outdoor GPS and 9 DOF IMU
- Note: This is a special order item. Returns are not accepted on special order and clearance items unless they are defective, in which case the product may be repaired or replaced at RobotShop's discretion.
The Dr. Robot Jaguar 4x4 Mobile Platform is designed for indoor and outdoor operation requiring higher ground clearance and faster maneuverability. The Jaguar-4x4-wheel platform is a wheeled version of the Jaguar-Lite platform. It is driven by four powerful (80W) motors, one for each wheel. It is rugged, light weight (< 20Kg), fast (max 15km/hr), with high ground clearance (88mm), compact, weather and water resistant. It is designed for tough terrains and capable of running over vertical step up to 155mm and climbing up low rise stairs (up to 110mm step).
It is fully wirelessly (802.11G) connected. It integrates outdoor GPS and 9 DOF IMU (Gyro/Accelerometer/Compass) for autonomous navigation. The integrated high resolution video/audio and laser scanner (optional) provide remote operator detail information of the surrounding. Besides the ready to use control and navigation software, a full development kit including SDK, data protocol and sample codes, is also available.
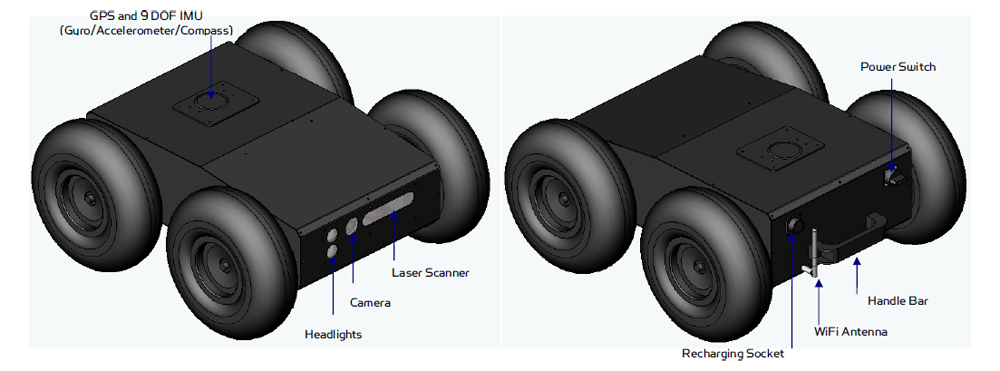
The figure below illustrates the key components that you will identify on the Dr. Robot Jaguar 4x4 Mobile Platform:
Operation Scenario
Diagram below illustrates the typical operation scenario. The Dr. Robot Jaguar 4x4 Mobile Platform is a wireless networked outdoor mobile robot. It comes with a wireless 802.11 AP/router. The remote host controller PC running the "Jaguar Control" program connects to the Dr. Robot Jaguar 4x4 Mobile Platform via Network Cable or Wireless. End user could develop his own jaguar control program using the supplied development API and tools.
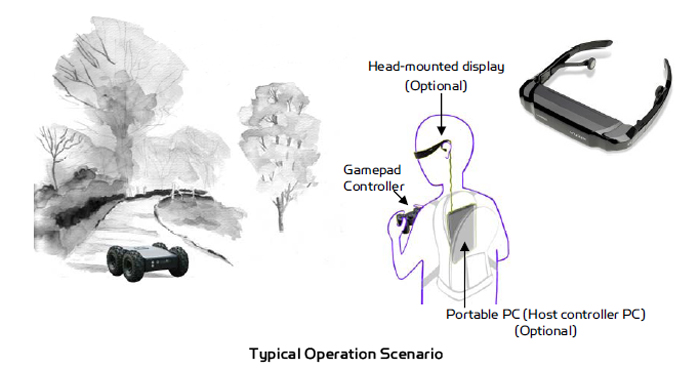
You could use the included Gamepad controller to navigate the robot. When used outdoor, especially under direct sunlights, head-mounted display (not included) will provide clear and large display with excellent outdoor experience.
Features:
- Rugged and reliable mobile platform for indoor and outdoor applications with faster maneuverability (max 15Km/hr)
- Weather and water resistant enclosure
- Climbing up > 45° slope or stairs (max 110mm or 4.5")
- Light weight (< 20Kg) and compact design with large payload capacity
- Managing max 155mm (6”) vertical step (obstacle)
- Integrated Laser scanner (Optional)
- Integrated high resolution video camera with audio
- All 802.11G (optional 802.11N) wirelessly connected
- Head mounted display (optional) and Gamepad controller providing outdoor operation with large and clear view even under direct sunlight
- Ready to use control and navigation software
- Full development kit including SDK, data protocol and sample codes, supporting Microsoft® Robotics Studio, Microsoft® Visual Studio, NI LabVIEW®, MATLAB®, Java®

Recharging
The Jaguar robot uses high performance LiPo batteries. Extreme caution is needed while dealing with this type of battery, explosion and damage could occur. Please read the charge station manual first and follow all the safety rules before proceeding further.
- Operator remote control (gamepad controller)
- Head mounted display (dual 640 x 480 - optional)
- Shock-resistant chassis, wheels, hubs
- 4x 24V gear motors
- Motion and sensing controller
- PWM position and speed controller
- 5Hz GPS and 9DOF IMU
- Onboard temperature sensing and voltage monitoring
- Headlights
- Color camera (640 x 480, 30fps) with audio
- WiFi 802.11G
- Ethernet and serial port (RS232)
- 22.2V, 10AH LiPo rechargeable battery
- LiPo battery charger with balancer
- Full development kit including SDK, sample code
- Height: 255mm (10")
- Width: 530mm (21")
- Length: 570mm (22.5")
- Weight: 19.5Kg (Standard Configuration)
PDF Files
Jaguar 4x4 Wheel Running
Mobility
- Terrain: Sand, rock, concrete, gravel, grass, soil and others wet and dry
- Slope: > 45°
- Maximum vertical step: 155mm (6")
- Stair climbing: Max stair step height 110mm (4.5")
- Traverse: > 200mm (8")
- Speed: 0 - 15Km/hr
- Turning radius: 0, min 750mm (29.5") diameter of turning space
- Ground clearance: 88mm (3.5")
- Operator remote control
- Autonomous navigation with GPS and 9 DOF IMU (Gyro/Accelerometer/Compass)
- Indoor vision landmark GPS (Optional)
Surivability
- Sealed weather resistant enclosure
- Temperature: -30° to +50°
- Shock resistant chassis
Electronics
- Motion and sensing controller (PWM, Position and Speed Control)
- 5Hz GPS and 9 DOF IMU (Gyro/Accelerometer/Compass)
- Laser scanner (4m or 30m) (Optional)
- Temperature sensing & Voltage monitoring
- Headlights
Video / Audio
- Color Camera (640x480, 30fps) with audio
Communication
- WiFi802.11G (Optional WiFi 802.11N)
- Ethernet
- Serial (RS232)
External auxiliary ports
- Ethernet (Optional)
- General purpose communication and power port (Optional)
Operator Control Unit
- Gamepad Controller
- Head mounted display (Dual 640 x 480), equivalent to 60" display viewed in 2.7m (9 feet)(optional)
- Portable computer (Optional)
Power
- Rechargeable battery: LiPo 22.2V 10AH
- LiPo battery charger with balancer
- Nominal operation time: 2 hours (Optional 4 hours)
Motor
- Wheel Motors (24V) : 4 units
- Max output (after gear down) (x4): Max 80W, 65Kg.cm/wheel
- Rated current: 2.75A, Max current 16A
Payload
- Carrying Payload: max 30Kg
- Dragging Payload: max 50Kg
Application development
- Full development kit including SDK, data protocol and sample codes, support Microsoft® Robotics Studio, Microsoft® Visual Studio, NI LabVIEW®, MATLAB®, Java®