

This article introduces an implementation of a simplified filtering algorithm that was inspired by Kalman filter. The Arduino code is tested using a 5DOF IMU unit from GadgetGangster - Acc_Gyro . The theory behind this algorithm was first introduced in my Imu Guide article.
Parts needed to complete the project:
- Arduino Duemilanove (or similar Arduino platform)
- Acc_Gyro 5DOF IMU board
- Protoshield (optional)
- Breadboard
- Hook-up wire 22AWG
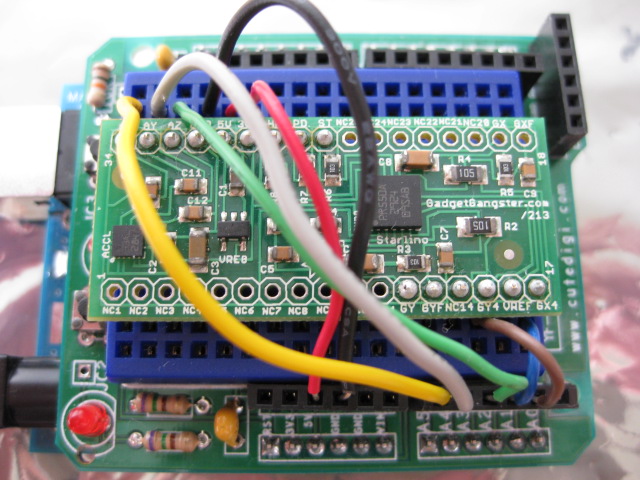
The hook-up diagram is as follows:
Acc_Gyro <---> Arduino
5V <---> 5V
GND <---> GND
AX <---> AN0
AY <---> AN1
AZ <---> AN2
GX4 <---> AN3
GY4 <---> AN4
Test results show algorithm is really eliminating some noise:

For complete article, source code and other downloads see:
http://starlino.com/imu_kalman_arduino.html